
전남대 손형일 교수(융합바이오시스템기계공학과)와 박용현 박사과정생, 김창조 석사과정생으로 구성된 연구팀은 과채 줄기의 6차원 위치 및 방향 추정을 통해 로봇이 실시간으로 빠르고 안정적이며 정밀하게 수확할 수 있는 ‘과채류 수확 로봇제어 알고리즘’을 개발했다.
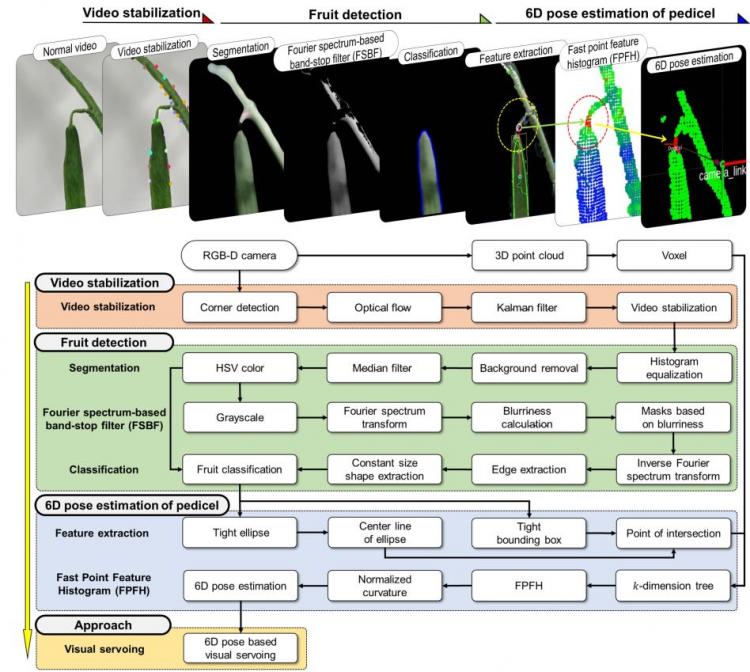
연구팀에 따르면 이 알고리즘은 ▲로봇이 과채를 정확한 위치를 파악할 수 있도록 미세한 움직임까지 추적하는 ‘비디오 안정화 기술’ ▲과일과 줄기를 더욱 선명하게 인식할 수 있게 만드는 ‘푸리에 스펙트럼 기반의 가변 필터’ ▲로봇이 과채 줄기의 정확한 위치를 파악해 올바른 위치에서 절단 장치를 가동해 수확할 수 있게 하는 ‘포인트 클라우드 기술’이 융복합됐다.
연구팀은 또 이 시스템을 다수의 과채류 스마트 팜 현장에서 성능을 실험한 결과 고도의 인식 정확도와 접근 정확도를 보였다고 덧붙였다.
이 연구는 스마트팜 다부처 패키지혁신기술개발사업, 한국연구재단 중견연구지원사업, BK21 4단계 IT-Bio융합시스템농업교육연구단 등의 지원으로 수행됐으며, 연구논문은 융복합농업 분야 국제학술지 ‘Computers and Electronics in Agriculture’(JCR 상위 0.9%, IF 8.3)에 게재됐다.
연구팀은 이번에 개발한 로봇제어 알고리즘을 과채류 수확뿐만 아니라 사람과 함께 하는 적엽(잎 제거), 적화(꽃 제거), 적과(선택적 과수 수확) 등 다양하고 복잡한 작업에도 적용하기 위해 ‘양팔 농작업 로봇’에 대한 후속 연구에 착수했다.
*논문 원제
Fast and stable pedicel detection for robust visual servoing to harvest shaking fruits. Computers and Electronics in Agriculture, vol. 220, 2024.
*문의 : (062)530-2152, http://hralab.jnu.ac.kr (전남대학교 바이오사이버네틱스 연구센터, 인간중심 로봇 및 자동화 연구실)
news@presszon.kr



